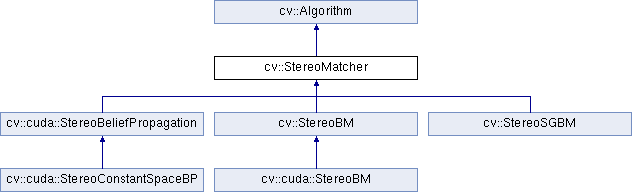
The base class for stereo correspondence algorithms.
More...
#include <opencv2/calib3d.hpp>
The base class for stereo correspondence algorithms.
| Enumerator |
|---|
| DISP_SHIFT |
|
| DISP_SCALE |
|
Computes disparity map for the specified stereo pair.
- Parameters
-
| left | Left 8-bit single-channel image. |
| right | Right image of the same size and the same type as the left one. |
| disparity | Output disparity map. It has the same size as the input images. Some algorithms, like StereoBM or StereoSGBM compute 16-bit fixed-point disparity map (where each disparity value has 4 fractional bits), whereas other algorithms output 32-bit floating-point disparity map. |
| virtual int cv::StereoMatcher::getBlockSize |
( |
| ) |
const |
|
pure virtual |
| virtual int cv::StereoMatcher::getDisp12MaxDiff |
( |
| ) |
const |
|
pure virtual |
| virtual int cv::StereoMatcher::getMinDisparity |
( |
| ) |
const |
|
pure virtual |
| virtual int cv::StereoMatcher::getNumDisparities |
( |
| ) |
const |
|
pure virtual |
| virtual int cv::StereoMatcher::getSpeckleRange |
( |
| ) |
const |
|
pure virtual |
| virtual int cv::StereoMatcher::getSpeckleWindowSize |
( |
| ) |
const |
|
pure virtual |
| virtual void cv::StereoMatcher::setBlockSize |
( |
int |
blockSize | ) |
|
|
pure virtual |
| virtual void cv::StereoMatcher::setDisp12MaxDiff |
( |
int |
disp12MaxDiff | ) |
|
|
pure virtual |
| virtual void cv::StereoMatcher::setMinDisparity |
( |
int |
minDisparity | ) |
|
|
pure virtual |
| virtual void cv::StereoMatcher::setNumDisparities |
( |
int |
numDisparities | ) |
|
|
pure virtual |
| virtual void cv::StereoMatcher::setSpeckleRange |
( |
int |
speckleRange | ) |
|
|
pure virtual |
| virtual void cv::StereoMatcher::setSpeckleWindowSize |
( |
int |
speckleWindowSize | ) |
|
|
pure virtual |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from cv::Algorithm
Public Member Functions inherited from cv::Algorithm 1.8.3
1.8.3