#include <opencv2/videostab/stabilizer.hpp>
| cv::videostab::TwoPassStabilizer::TwoPassStabilizer |
( |
| ) |
|
| virtual Mat cv::videostab::TwoPassStabilizer::estimateMotion |
( |
| ) |
|
|
protectedvirtual |
| virtual Mat cv::videostab::TwoPassStabilizer::estimateStabilizationMotion |
( |
| ) |
|
|
protectedvirtual |
| bool cv::videostab::TwoPassStabilizer::mustEstimateTrimaRatio |
( |
| ) |
const |
|
inline |
| virtual Mat cv::videostab::TwoPassStabilizer::nextFrame |
( |
| ) |
|
|
virtual |
| virtual Mat cv::videostab::TwoPassStabilizer::postProcessFrame |
( |
const Mat & |
frame | ) |
|
|
protectedvirtual |
| virtual void cv::videostab::TwoPassStabilizer::reset |
( |
| ) |
|
|
virtual |
| void cv::videostab::TwoPassStabilizer::runPrePassIfNecessary |
( |
| ) |
|
|
protected |
| void cv::videostab::TwoPassStabilizer::setEstimateTrimRatio |
( |
bool |
val | ) |
|
|
inline |
| virtual void cv::videostab::TwoPassStabilizer::setUp |
( |
const Mat & |
firstFrame | ) |
|
|
protectedvirtual |
| bool cv::videostab::TwoPassStabilizer::doWobbleSuppression_ |
|
protected |
| int cv::videostab::TwoPassStabilizer::frameCount_ |
|
protected |
| bool cv::videostab::TwoPassStabilizer::isPrePassDone_ |
|
protected |
| std::vector<Mat> cv::videostab::TwoPassStabilizer::motions2_ |
|
protected |
| bool cv::videostab::TwoPassStabilizer::mustEstTrimRatio_ |
|
protected |
| Mat cv::videostab::TwoPassStabilizer::suppressedFrame_ |
|
protected |
The documentation for this class was generated from the following file:
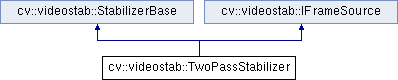
 Protected Member Functions inherited from cv::videostab::StabilizerBase
Protected Member Functions inherited from cv::videostab::StabilizerBase 1.8.3
1.8.3