Examples > Robot
Wheel Calibration
Use this sketch to calibrate the wheels of your robot. Your robot should move in a straight line when putting both motors at the same speed.
Run the software and follow the on-screen instructions. Use the potentiometer on the bottom board to adjust the calibration.
Hardware Required
- Arduino Robot
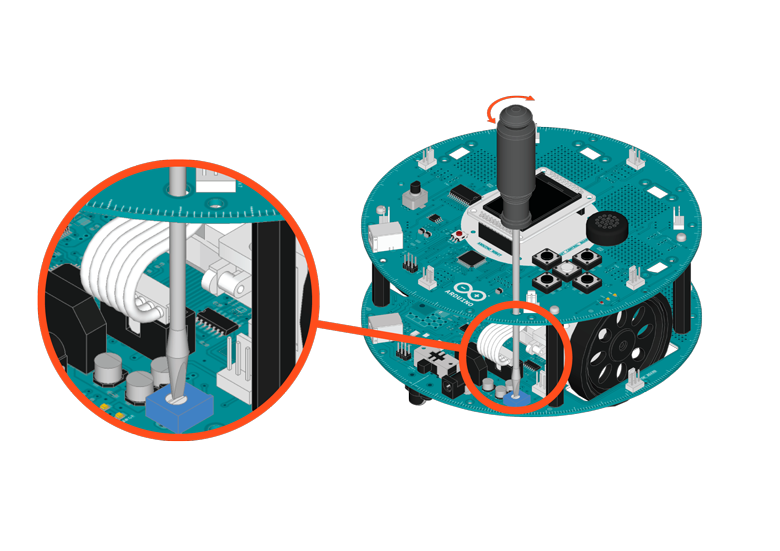
- A long thin screwdriver
Instruction
- Upload the example, unplug USB and turn on power
- Find a flat surface, on the ground. Have a screwdriver that fits into the pot on the Motor Board ready.
- After the starting screen, a list of instructions will show up.
- You can change the robot speed by adjusting the knob on Control Board.
- Put the robot on the flat surface, and see if it's going a straight line
- If the robot goes in a curve, you need to adjust the morto board's trimmer potentiometer with screwdriver.
- If the robot is turning left, screw it clockwise
- If it's turning right, screw it counter-clockwise
- If the robot is still turning, repeat the process until it's moving in a straight line.
- The number on the bottom-right corner of the LCD screen is the calibration value, ranging from -30% to 30%. It can help keep track of your process.
Try it out
Calibrate the robot's wheels
Code
/* 6 Wheel Calibration
*
* Use this sketch to calibrate the wheels in your robot.
* Your robot should drive as straight as possible when
* putting both motors at the same speed.
*
* Run the software and follow the on-screen instructions.
* Use the trimmer on the bottom board to make sure the
* robot is working at its best!
*
* (c) 2013 X. Yang
*/
#include "scripts_library.h"
#include <ArduinoRobot.h>
#include <Wire.h>
void setup() {
Serial.begin(9600);
Robot.begin();
Robot.beginTFT();
Robot.beginSD();
Robot.setTextWrap(false);
Robot.displayLogos();
writeAllScripts();
}
void loop() {
int val = map(Robot.knobRead(), 0, 1023, -255, 255);
Serial.println(val);
Robot.motorsWrite(val, val);
int WC = map(Robot.trimRead(), 0, 1023, -20, 20);
Robot.debugPrint(WC, 108, 149);
delay(40);
}
*
* Use this sketch to calibrate the wheels in your robot.
* Your robot should drive as straight as possible when
* putting both motors at the same speed.
*
* Run the software and follow the on-screen instructions.
* Use the trimmer on the bottom board to make sure the
* robot is working at its best!
*
* (c) 2013 X. Yang
*/
#include "scripts_library.h"
#include <ArduinoRobot.h>
#include <Wire.h>
void setup() {
Serial.begin(9600);
Robot.begin();
Robot.beginTFT();
Robot.beginSD();
Robot.setTextWrap(false);
Robot.displayLogos();
writeAllScripts();
}
void loop() {
int val = map(Robot.knobRead(), 0, 1023, -255, 255);
Serial.println(val);
Robot.motorsWrite(val, val);
int WC = map(Robot.trimRead(), 0, 1023, -20, 20);
Robot.debugPrint(WC, 108, 149);
delay(40);
}
