Web Client
This example shows you how to make a HTTP request using an Ethernet shield. It returns a Google search for the term "Arduino". The results of this search are viewable as HTML in the Serial Monitor.
Hardware Required
- Arduino or Genuino Board
- Arduino Ethernet Shield
Circuit
The Ethernet shield allows you to connect a WIZNet Ethernet controller to the Arduino or Genuino boards via the SPI bus. It uses the ICSP header pins and pin 10 as chip select for the SPI connection to the Ethernet controller chip. Later models of the Ethernet shield also have an SD Card on board. Digital pin 4 is used to control the slave select pin on the SD card.
The shield should be connected to a network with an Ethernet cable. You will need to change the network settings in the program to correspond to your network.
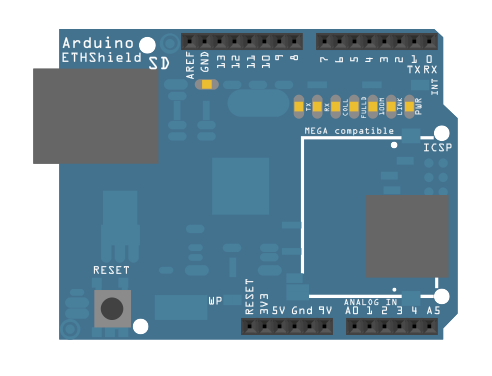
Image developed using Fritzing. For more circuit examples, see the Fritzing project page
In the above image, the Arduino or Genuino board would be stacked below the Ethernet shield.
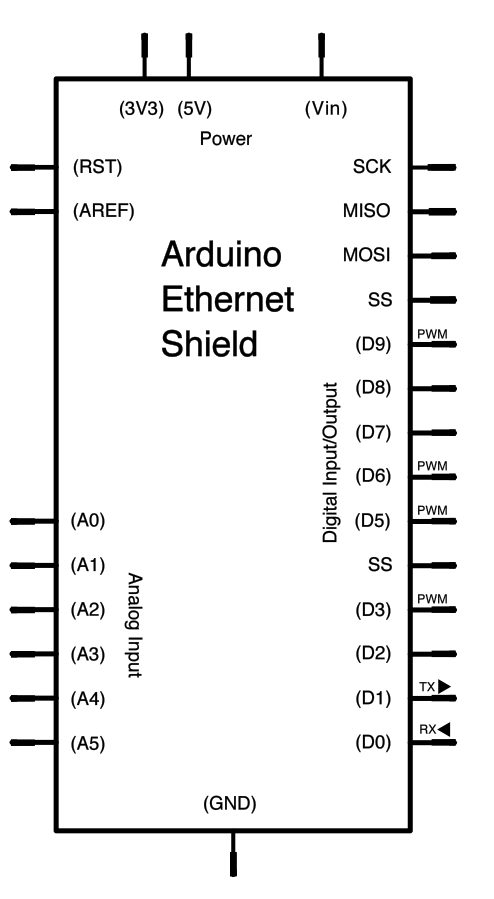
Schematic
Code
Web client
This sketch connects to a website (http://www.google.com)
using an Arduino Wiznet Ethernet shield.
Circuit:
* Ethernet shield attached to pins 10, 11, 12, 13
created 18 Dec 2009
by David A. Mellis
modified 9 Apr 2012
by Tom Igoe, based on work by Adrian McEwen
*/
#include <SPI.h>
#include <Ethernet.h>
// Enter a MAC address for your controller below.
// Newer Ethernet shields have a MAC address printed on a sticker on the shield
byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED };
// if you don't want to use DNS (and reduce your sketch size)
// use the numeric IP instead of the name for the server:
//IPAddress server(74,125,232,128); // numeric IP for Google (no DNS)
char server[] = "www.google.com"; // name address for Google (using DNS)
// Set the static IP address to use if the DHCP fails to assign
IPAddress ip(192, 168, 0, 177);
IPAddress myDns(192, 168, 0, 1);
// Initialize the Ethernet client library
// with the IP address and port of the server
// that you want to connect to (port 80 is default for HTTP):
EthernetClient client;
// Variables to measure the speed
unsigned long beginMicros, endMicros;
unsigned long byteCount = 0;
bool printWebData = true; // set to false for better speed measurement
void setup() {
// You can use Ethernet.init(pin) to configure the CS pin
//Ethernet.init(10); // Most Arduino shields
//Ethernet.init(5); // MKR ETH shield
//Ethernet.init(0); // Teensy 2.0
//Ethernet.init(20); // Teensy++ 2.0
//Ethernet.init(15); // ESP8266 with Adafruit Featherwing Ethernet
//Ethernet.init(33); // ESP32 with Adafruit Featherwing Ethernet
// Open serial communications and wait for port to open:
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB port only
}
// start the Ethernet connection:
Serial.println("Initialize Ethernet with DHCP:");
if (Ethernet.begin(mac) == 0) {
Serial.println("Failed to configure Ethernet using DHCP");
// Check for Ethernet hardware present
if (Ethernet.hardwareStatus() == EthernetNoHardware) {
Serial.println("Ethernet shield was not found. Sorry, can't run without hardware. :(");
while (true) {
delay(1); // do nothing, no point running without Ethernet hardware
}
}
if (Ethernet.linkStatus() == LinkOFF) {
Serial.println("Ethernet cable is not connected.");
}
// try to congifure using IP address instead of DHCP:
Ethernet.begin(mac, ip, myDns);
} else {
Serial.print(" DHCP assigned IP ");
Serial.println(Ethernet.localIP());
}
// give the Ethernet shield a second to initialize:
delay(1000);
Serial.print("connecting to ");
Serial.print(server);
Serial.println("...");
// if you get a connection, report back via serial:
if (client.connect(server, 80)) {
Serial.print("connected to ");
Serial.println(client.remoteIP());
// Make a HTTP request:
client.println("GET /search?q=arduino HTTP/1.1");
client.println("Host: www.google.com");
client.println("Connection: close");
client.println();
} else {
// if you didn't get a connection to the server:
Serial.println("connection failed");
}
beginMicros = micros();
}
void loop() {
// if there are incoming bytes available
// from the server, read them and print them:
int len = client.available();
if (len > 0) {
byte buffer[80];
if (len > 80) len = 80;
client.read(buffer, len);
if (printWebData) {
Serial.write(buffer, len); // show in the serial monitor (slows some boards)
}
byteCount = byteCount + len;
}
// if the server's disconnected, stop the client:
if (!client.connected()) {
endMicros = micros();
Serial.println();
Serial.println("disconnecting.");
client.stop();
Serial.print("Received ");
Serial.print(byteCount);
Serial.print(" bytes in ");
float seconds = (float)(endMicros - beginMicros) / 1000000.0;
Serial.print(seconds, 4);
float rate = (float)byteCount / seconds / 1000.0;
Serial.print(", rate = ");
Serial.print(rate);
Serial.print(" kbytes/second");
Serial.println();
// do nothing forevermore:
while (true) {
delay(1);
}
}
}
See also
- Arduino Ethernet Shield – Product description.
- Getting started with the Ethernet Shield – Get everything set up in minutes.
- Ethernet library – Your reference for the Ethernet Library.
- ChatServer - A simple server that distributes any incoming messages to all connected clients.
- WebClientRepeating - How to make repeated HTTP requests using the Ethernet shield.
- WebServer - A simple web server that shows the value of the analog input.
- DhcpAddressPrinter – Get a DHCP address and print it on serial monitor.
- DhcpChatServer – Connect to a Telnet server and print on serial monitor all the received messages; uses DHCP.
- TelnetClient - Connect to a Telnet server and print on serial monitor all the received messages
- BarometricPressureWebServer – Post data read from a pressure sensor using SPI.
- UDPSendReceiveString - Send and receive text strings via the UDP protocol (Universal Datagram Packet).
- UdpNtpClient - query a Network Time Protocol (NTP) server and get the information through serial monitor.
Last revision 2018/09/07 by SM
